compact reachability map for excavator motion planning Abstract: In this paper, we propose a novel compact reachability map representation for . Mini Excavator JA07-3 https://www.youtube.com/watch?v=Q4z-BnMH_4A&t=12s Mini excavator can dig holes, plan the ground, clear land, crush, plant trees, open roads, etc.
0 · Reachability Map
1 · HKU Scholars Hub: Compact reachability map for excavator
2 · Compact Reachability Map for Excavator Motion Planning
China Excavator Pin Bushing wholesale - Select 2024 high quality Excavator Pin Bushing products in best price from certified Chinese Excavator For Sale manufacturers, Bucket Wheel Excavator suppliers, wholesalers and factory on Made-in-China.com
Reachability Map
Abstract: In this paper, we propose a novel compact reachability map representation for . In this paper, we propose a novel compact reachability map representation for . In this work, a novel search-based motion planning methodology for excavators is .
In this paper, we propose a novel compact reachability map representation for excavator .
HKU Scholars Hub: Compact reachability map for excavator
Compact Reachability Map for Excavator Motion Planning
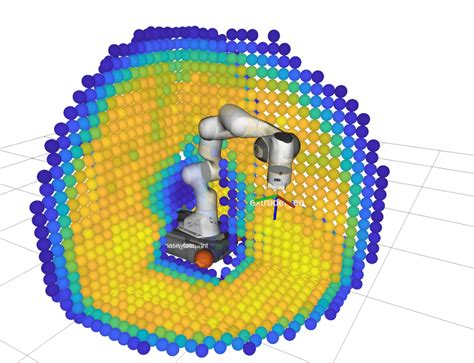
In this paper, we propose a novel compact reachability map representation for excavator . Our experimental results show that the orientation-based reachability map is as .Abstract: In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure.
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure.
In this work, a novel search-based motion planning methodology for excavators is proposed. The approach involves constructing a graph representation that encodes feasible excavator bucket poses and movement direction based on the excavator’s reachability map.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
Our experimental results show that the orientation-based reachability map is as fast as the position-based reachability map while benefiting from the additional extension capability. Compact Reachability Map for Excavator Motion Planning Authors : Yajue Yang , Liangjun Zhang , Xinjing Cheng , Jia Pan , Ruigang Yang Authors Info & Claims 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
skid steer terex
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
A novel search-based method is proposed to plan the motion of an excavator robot considering its unique characteristics and constraints. The method constructs a reachability map that encodes the feasible poses and directions of the bucket in the driving space, and minimizes the displacement of hydraulic cylinders.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encod.Abstract: In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure. In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure.
In this work, a novel search-based motion planning methodology for excavators is proposed. The approach involves constructing a graph representation that encodes feasible excavator bucket poses and movement direction based on the excavator’s reachability map.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure. Our experimental results show that the orientation-based reachability map is as fast as the position-based reachability map while benefiting from the additional extension capability. Compact Reachability Map for Excavator Motion Planning Authors : Yajue Yang , Liangjun Zhang , Xinjing Cheng , Jia Pan , Ruigang Yang Authors Info & Claims 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
A novel search-based method is proposed to plan the motion of an excavator robot considering its unique characteristics and constraints. The method constructs a reachability map that encodes the feasible poses and directions of the bucket in the driving space, and minimizes the displacement of hydraulic cylinders.
Liebherr Z-System Excavator R944 Bucket Teeth 3001319 SPECIFICATIONS. PART NO. 3001319, R944, R934, R954. Replacement Brand Liebherr. Application Excavator, Loader. Material High spec alloy steel. Production Method Lost Wax investment casting. Hardness HRC46-52. Impact ≥20J. Tensile Strength ≥1400Rm-N/mm². Package Details Export plywood .
compact reachability map for excavator motion planning|HKU Scholars Hub: Compact reachability map for excavator