compact reachability map for excavator motion planning In this work, a novel search-based motion planning methodology for excavators is . Expand the utility of your mini excavator’s bucket with a thumb attachment to get a better grip when grappling debris or outfit your excavator with a ripper to pull up slabs and stumps and scarify earth.
0 · Reachability Map
1 · HKU Scholars Hub: Compact reachability map for excavator
2 · Compact Reachability Map for Excavator Motion Planning
Find 17 used John Deere 17G mini excavators for sale near you. Browse the most popular brands and models at the best prices on Machinery Pete.
Abstract: In this paper, we propose a novel compact reachability map representation for . In this paper, we propose a novel compact reachability map representation for . In this work, a novel search-based motion planning methodology for excavators is .In this paper, we propose a novel compact reachability map representation for excavator .
In this paper, we propose a novel compact reachability map representation for excavator . Our experimental results show that the orientation-based reachability map is as .
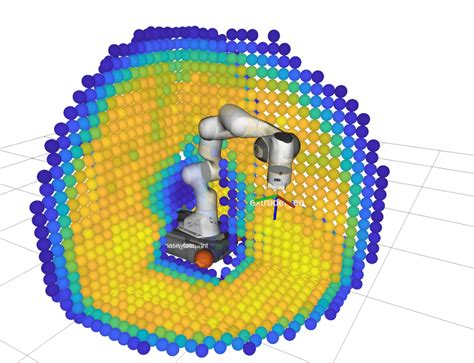
Abstract: In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure. In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure. In this work, a novel search-based motion planning methodology for excavators is proposed. The approach involves constructing a graph representation that encodes feasible excavator bucket poses and movement direction based on the excavator’s reachability map.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure. Our experimental results show that the orientation-based reachability map is as fast as the position-based reachability map while benefiting from the additional extension capability. Compact Reachability Map for Excavator Motion Planning Authors : Yajue Yang , Liangjun Zhang , Xinjing Cheng , Jia Pan , Ruigang Yang Authors Info & Claims 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
A novel search-based method is proposed to plan the motion of an excavator robot considering its unique characteristics and constraints. The method constructs a reachability map that encodes the feasible poses and directions of the bucket in the driving space, and minimizes the displacement of hydraulic cylinders.
Reachability Map
HKU Scholars Hub: Compact reachability map for excavator
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encod.Abstract: In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure.

In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure.
In this work, a novel search-based motion planning methodology for excavators is proposed. The approach involves constructing a graph representation that encodes feasible excavator bucket poses and movement direction based on the excavator’s reachability map.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
Our experimental results show that the orientation-based reachability map is as fast as the position-based reachability map while benefiting from the additional extension capability. Compact Reachability Map for Excavator Motion Planning Authors : Yajue Yang , Liangjun Zhang , Xinjing Cheng , Jia Pan , Ruigang Yang Authors Info & Claims 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
A novel search-based method is proposed to plan the motion of an excavator robot considering its unique characteristics and constraints. The method constructs a reachability map that encodes the feasible poses and directions of the bucket in the driving space, and minimizes the displacement of hydraulic cylinders.

Compact Reachability Map for Excavator Motion Planning
loading mini excavator in dump truck
This one’s built for heavy-duty soil compaction, with centrifugal forces up to 73,063 lbs. It features standard dual amplitudes and dual frequencies, standard dual auto vibration control and an oscillating articulated roller joint that keeps the drum-to-ground contact consistent.Browse a wide selection of new and used Compactor Wheel for sale near you at MachineryTrader.com. Find Compactor Wheel from CARON, CATERPILLAR, STEEL UNLIMITED, and more . Attachment Category. Category - Applied. .
compact reachability map for excavator motion planning|Reachability Map