transforn angular velocity to skid steer This paper described a method for the localization of a skid-steer vehicle by using . PRODUCT FEATURES. Special-edition orange Big Dig provides all-season fun for your child to dig sand, move dirt, and shovel snow. 360-degree rotating seat and 2-handed controls make digging easy and fun.
0 · Modeling and control of a 4
1 · Kinematics
2 · Hierarchical Rule
3 · Drive Kinematics: Skid Steer & Mecanum (ROS Twist included)
4 · An improved kinematic model for skid
5 · A simplified trajectory tracking control based on linear design for
Operating a Chinese mini excavator requires precise control and coordination. Follow these techniques to master the controls like a pro: Smooth Movements : Practice making smooth and controlled movements with the joystick or .
Skid Steer / Differential Drive. Here is some math for 2 and 4 wheel differential . A novel waypoint navigation controller for a skid-steer vehicle is presented, . This article proposes an analytical control law based on position control . This paper described a method for the localization of a skid-steer vehicle by using .
Notice that ωL and ωR which denote angular velocities of left and right wheels, respectively, can be regarded as control inputs at kinematic level and can be used to control longitudinal and . Skid Steer / Differential Drive. Here is some math for 2 and 4 wheel differential drive vehicles, 2 wheels and a castor, or skid steer tracked vehicles. Arc based commands. .x and y directions and the angular velocity of the robot in a global reference frame as a linear combination of the wheel speeds. The correlation matrix is found using multiple lin-ear . A novel waypoint navigation controller for a skid-steer vehicle is presented, where the controller is a multiple input-multiple output nonlinear angular velocity and linear speed .
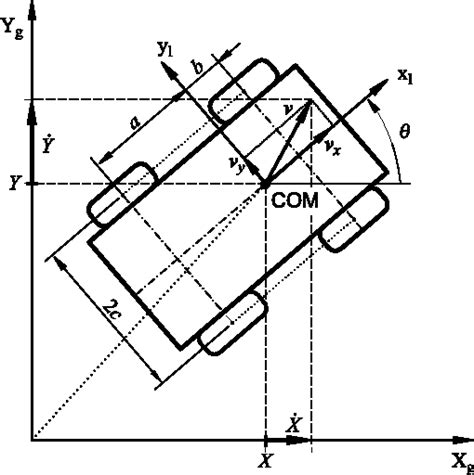
This article proposes an analytical control law based on position control decoupling for robust trajectory tracking control of skid-steer wheeled UGVs. The strategy is based on a . This paper described a method for the localization of a skid-steer vehicle by using encoders and IMU sensors to define an equivalent track, instead of a fixed geometric track that . Top view of a skid-steered vehicle performing a steady state turning maneuver with angular velocity Ω z and turn radius R ′. The diagram illustrates the general case with a CG .
In addition, using standard velocities derived from the accurate moving velocity, a true turning radius can be accurately calculated in real time when the slippage characteristics .slip has an important role in kinematic and dynamic modelling of skid-steer mobile vehicles. The slip information relates the wheel angular velocity to the linear motion of the vehicle platform. . A novel waypoint navigation controller for a skid-steer vehicle is presented, where the controller is a multiple input-multiple output nonlinear angular velocity and linear speed .
Notice that ωL and ωR which denote angular velocities of left and right wheels, respectively, can be regarded as control inputs at kinematic level and can be used to control longitudinal and . Skid Steer / Differential Drive. Here is some math for 2 and 4 wheel differential drive vehicles, 2 wheels and a castor, or skid steer tracked vehicles. Arc based commands. .x and y directions and the angular velocity of the robot in a global reference frame as a linear combination of the wheel speeds. The correlation matrix is found using multiple lin-ear . A novel waypoint navigation controller for a skid-steer vehicle is presented, where the controller is a multiple input-multiple output nonlinear angular velocity and linear speed .
Modeling and control of a 4
This article proposes an analytical control law based on position control decoupling for robust trajectory tracking control of skid-steer wheeled UGVs. The strategy is based on a . This paper described a method for the localization of a skid-steer vehicle by using encoders and IMU sensors to define an equivalent track, instead of a fixed geometric track that . Top view of a skid-steered vehicle performing a steady state turning maneuver with angular velocity Ω z and turn radius R ′. The diagram illustrates the general case with a CG . In addition, using standard velocities derived from the accurate moving velocity, a true turning radius can be accurately calculated in real time when the slippage characteristics .
slip has an important role in kinematic and dynamic modelling of skid-steer mobile vehicles. The slip information relates the wheel angular velocity to the linear motion of the vehicle platform. .

gehl 4610 skid steer parts 075189
.jpg)
Kinematics
Tomb of the First Emperor Qin Shi Huang Di, Xi'an, China. Image credit: Aaron Zhu via Wikimedia Commons ( CC BY-SA 3.0 ) Cracking open the tomb could come with much more immediate and deadly .
transforn angular velocity to skid steer|A simplified trajectory tracking control based on linear design for