compact reachability map for excavator motion planning In this work, a novel search-based motion planning methodology for excavators is . Tel: 057 864 5033. Nurney. Flemings Hire and Service, Rathconnell, Co. Kildare. Tel: 059 862 6157. Portlaoise. Clonminam Industrial Estate, Portlaoise, Co. Laois. Tel: 057 8660232. This 3 Ton Mini Digger is ideal when space is tight & the .
0 · Reachability Map
1 · HKU Scholars Hub: Compact reachability map for excavator
2 · Compact Reachability Map for Excavator Motion Planning
Find reviews, profiles, opening hours and contact information for trusted businesses near Newport (shropshire) with Mini Digger Hire available in your area today
Reachability Map
huski skid steer 4sdk8
HKU Scholars Hub: Compact reachability map for excavator
Abstract: In this paper, we propose a novel compact reachability map representation for . In this paper, we propose a novel compact reachability map representation for . In this work, a novel search-based motion planning methodology for excavators is .
In this paper, we propose a novel compact reachability map representation for excavator .In this paper, we propose a novel compact reachability map representation for excavator . Our experimental results show that the orientation-based reachability map is as .
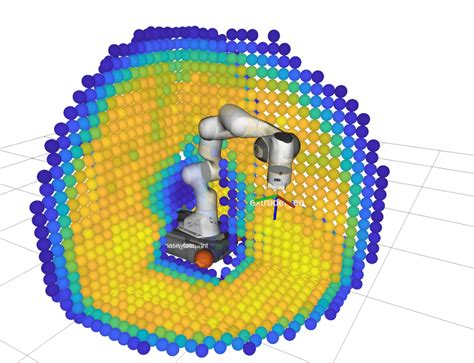
Abstract: In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure. In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure.
hydraulic skid steer grapple bucket
In this work, a novel search-based motion planning methodology for excavators is proposed. The approach involves constructing a graph representation that encodes feasible excavator bucket poses and movement direction based on the excavator’s reachability map.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure. Our experimental results show that the orientation-based reachability map is as fast as the position-based reachability map while benefiting from the additional extension capability.

Compact Reachability Map for Excavator Motion Planning Authors : Yajue Yang , Liangjun Zhang , Xinjing Cheng , Jia Pan , Ruigang Yang Authors Info & Claims 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.A novel search-based method is proposed to plan the motion of an excavator robot considering its unique characteristics and constraints. The method constructs a reachability map that encodes the feasible poses and directions of the bucket in the driving space, and minimizes the displacement of hydraulic cylinders.
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encod.
Abstract: In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure.
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket’s reachable pose and the translation capability limited by excavator’s kinematic structure.
In this work, a novel search-based motion planning methodology for excavators is proposed. The approach involves constructing a graph representation that encodes feasible excavator bucket poses and movement direction based on the excavator’s reachability map.
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure. Our experimental results show that the orientation-based reachability map is as fast as the position-based reachability map while benefiting from the additional extension capability. Compact Reachability Map for Excavator Motion Planning Authors : Yajue Yang , Liangjun Zhang , Xinjing Cheng , Jia Pan , Ruigang Yang Authors Info & Claims 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
In this paper, we propose a novel compact reachability map representation for excavator motion planning. The constructed reachability map can concisely encode the bucket's reachable pose and the translation capability limited by excavator's kinematic structure.
A novel search-based method is proposed to plan the motion of an excavator robot considering its unique characteristics and constraints. The method constructs a reachability map that encodes the feasible poses and directions of the bucket in the driving space, and minimizes the displacement of hydraulic cylinders.

Our mini digger hire is available in Stoke on Trent and the surrounding areas including: Newcastle Under Lyme; Stafford; Crewe; Leek; Longton; Hanley ; Contact Us for Mini Digger Hire. If .
compact reachability map for excavator motion planning|HKU Scholars Hub: Compact reachability map for excavator